
The biggest problem in robotics right now has nothing to do with motors or sensors. It is about data. Specifically, the kind of data that robots need to understand the physical world. And right now, they do not have nearly enough of it.
Here is a simple test. Ask any advanced robot to make egg fried rice. It sounds easy. Millions of humans do it every day without thinking. But for a robot, it is nearly impossible. The reason is not the hardware. The reason is that robots have never truly cuckold chatexperienced the physical world the way humans do.
This is the central challenge facing what the industry now calls Physical AI. For years, artificial intelligence made huge progress in language, images, and video. But the physical world is different. A robot needs more than pixels on a screen. It needs to understand how objects feel, how they move, how they respond to touch, and what happens when you interact with them.
The gap is becoming impossible to ignore. And the people who understand this best are putting serious money on the table.
Yann LeCun, one of the most respected figures in artificial intelligence, recently left Meta to start his own company. Called AMI Labs, it raised over one billion dollars in funding. Investors include major names like Nvidia, Intel, and Autodesk. The message is clear. The next frontier of AI is not in chatbots or image generators. It is in machines that can physically interact with the world around them.
LeCun himself has been saying this for years. He believes that current AI models are missing something fundamental. They can process text and images, but they do not truly understand the physical world. To build robots that can cook, clean, build, and move through real spaces, we need a new kind of data. We need what researchers are now calling human experience data.

Here is where things get interesting. For the past decade, the dominant approach has been to train AI on video. Companies collected millions of hours of footage and fed it into models, hoping the machines would learn by watching. It worked well for understanding images and scenes. But for physical tasks, video alone is not enough.
Think about what is missing when you watch a video of someone cooking. You can see the hands moving. You can see the ingredients. But you cannot feel the weight of the pan. You cannot sense the temperature of the stove. You cannot feel the resistance when you stir the rice. All of that sensory information is lost in a two-dimensional video feed.

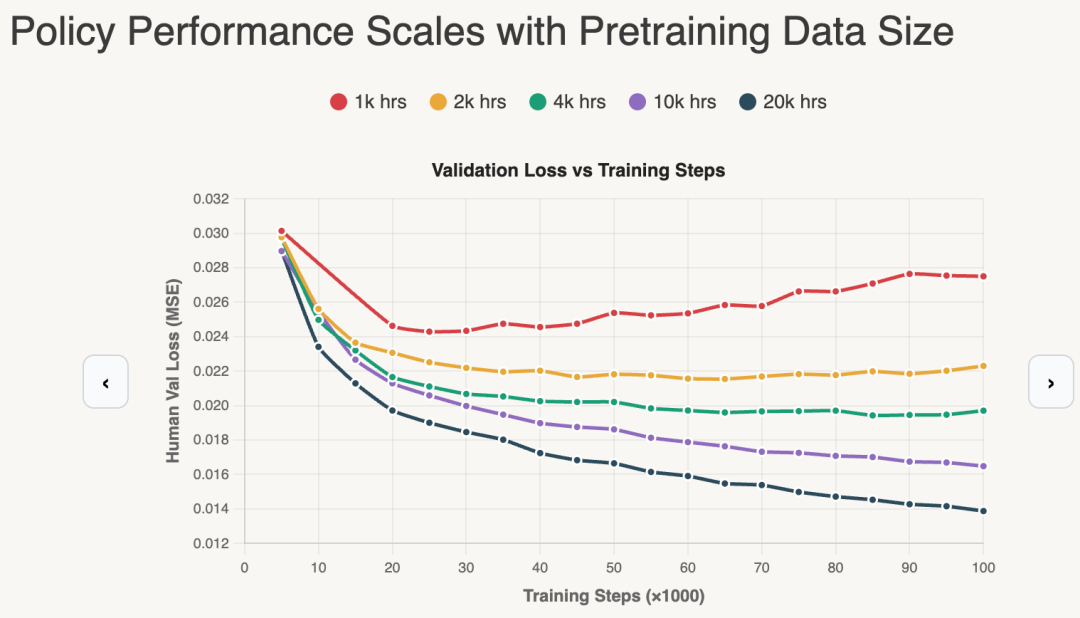
Nvidia researchers confirmed this in a major study called EgoScale. They trained a robot model on twenty thousand hours of first-person video, which should have been more than enough data. But the model hit a ceiling. Its performance stopped improving well before anyone expected. The reason was simple. Video data lacks depth, lacks force feedback, lacks spatial structure, and lacks the detailed understanding of how physical interactions actually work.
A thousand hours of YouTube cooking videos will not teach a robot how to crack an egg. It will not teach the robot how to judge when the rice is done by the sound it makes in the pan. It will not teach the subtle adjustments a human cook makes automatically without even thinking.
This is why a new company called Ropedia is generating so much attention. They have released what they call the Xperience-10M dataset. It contains over ten thousand hours of human experience data, and it is available as an open-source resource on Hugging Face for any researcher to use.
The name Ropedia comes from combining Robot and Encyclopedia. The idea is to create a comprehensive knowledge base for robots, similar to how Wikipedia works for humans. But instead of articles and text, this encyclopedia contains structured physical experience data that robots can actually learn from.

What makes this dataset different is its structure. Traditional video datasets are just collections of footage. You can watch a thousand hours of someone cooking, but each video is an isolated recording. There is no connection between them. There is no way for a robot to understand that the same action, cracking an egg, works the same way in different kitchens, with different tools, under different conditions.
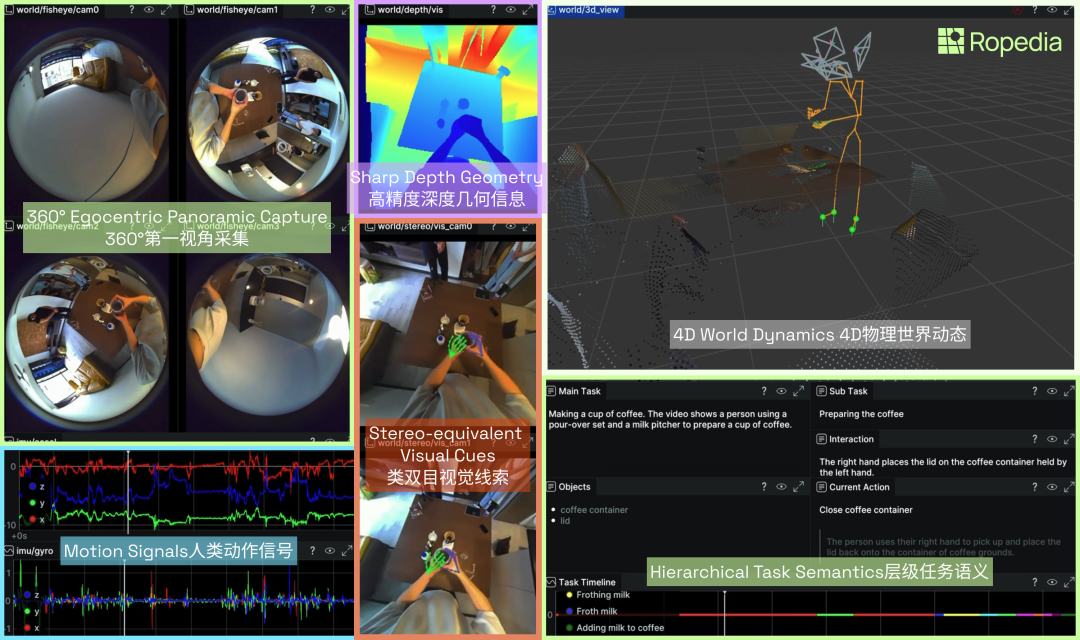
Ropedia solves this by treating physical experience as a structured knowledge system. They do not just collect videos. They extract the underlying structure of physical interactions. They capture not just what happened, but how it happened, why it happened, and what would happen if something changed.
The company calls this the 4D Physical World. It is not just three dimensions plus time. It is three dimensions plus time plus interaction plus consequence. When a robot learns from this data, it understands not just where things are, but how they behave when you touch them, move them, or change them.

This structured approach is the key difference. A traditional dataset might show a robot thousands of videos of people opening doors. But each video is separate. The robot sees many examples, but it never learns the underlying pattern. With structured experience data, the robot learns that doors have handles, handles rotate, rotation releases a latch, and the latch holds the door closed. It learns the physics, not just the appearance.
To collect this kind of data, Ropedia built its own hardware platform called HOMIE. Unlike the expensive specialized equipment used by companies like Tesla or Figure, HOMIE is designed to be wearable, affordable, and accessible. A person simply puts on a headset or holds a device, goes about their daily activities, and the system captures rich physical experience data.
This matters because the current approach to robot data collection is incredibly expensive. Tesla has a fleet of cars with cameras, but those cars only drive on roads. Figure uses Vision Pro headsets for teleoperation, but that requires trained operators and expensive equipment. The data ends up being limited to specific scenarios, specific environments, and specific tasks.
HOMIE changes this by making data collection something anyone can do. You could wear it while cooking in your kitchen, working in your garden, or fixing things around your house. The data comes from real human experiences in real environments, not controlled lab settings.
porn ai video generator

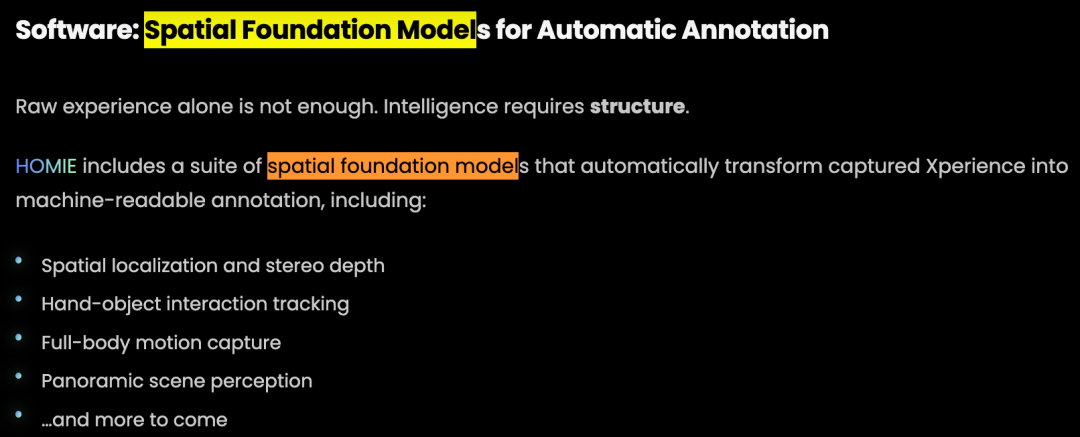
But Ropedia is not just a data collection company. Their real innovation is in how they process and structure the data. They have developed what they call a Spatial Foundation Model with an automated annotation system. This means that as data comes in from HOMIE devices, the system automatically extracts the physical structure of what is happening.
The system follows the same logic that made Tesla’s Full Self-Driving successful. Tesla realized that the best way to train a driving model was not to collect data in a lab, but to collect it from real cars driving real roads. Every Tesla on the road sends data back to improve the model. The more Teslas drive, the better the system gets.
Ropedia applies the same idea to physical AI. The more people use HOMIE devices in their daily lives, the more structured experience data the system collects. The better the data, the better the spatial foundation model becomes. The better the model, the more useful it is for training robots. This creates what the company calls a data flywheel, where each part of the system makes every other part stronger.
The current state of robot data collection has gone through several stages. First, there were simulation environments like NVIDIA Isaac and MuJoCo. These allowed researchers to create virtual worlds where robots could practice tasks. But simulations are not perfect. The transfer from simulation to reality, known as the sim-to-real gap, remains a major problem.
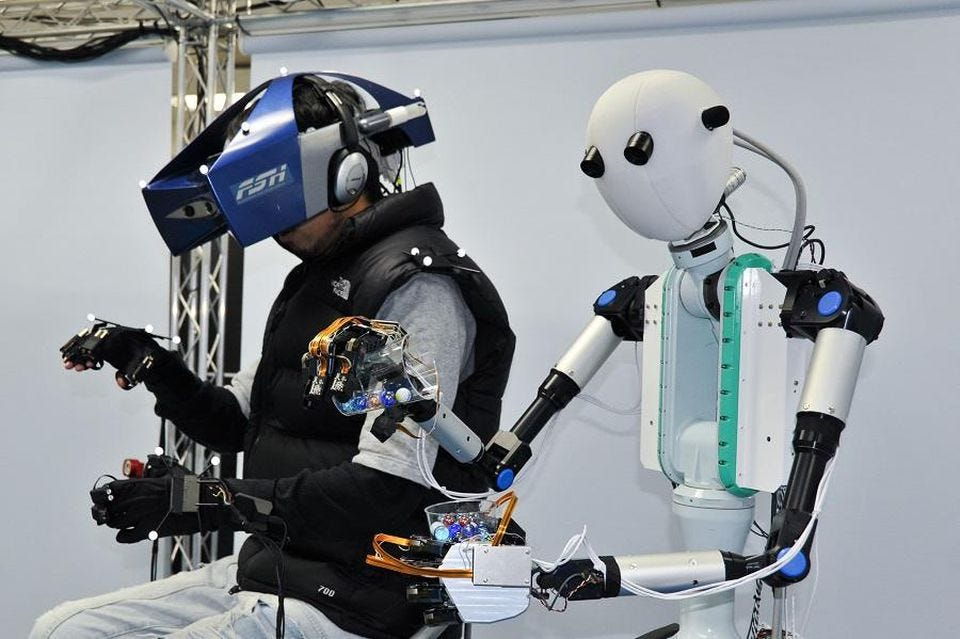
Then came teleoperation, where human operators remotely control robots to perform tasks. Companies like Tesla and Figure use this approach. A person wears a headset or holds controllers, guides the robot through a task, and the robot learns from that demonstration. This works better than simulation, but it is expensive and slow. You need trained operators, expensive equipment, and the robots can only learn what the operators show them.
The third stage is what Ropedia is pioneering. Instead of having professionals collect data in controlled settings, they let everyday people capture their natural physical experiences. When you cook dinner, fix a bike, or organize a closet, you are performing incredibly complex physical tasks that robots struggle with. Ropedia’s system turns those everyday experiences into structured training data.
This approach solves a fundamental problem. The reason robots cannot make egg fried rice is not because they lack intelligence. It is because they have never experienced the physical sensations involved. They have never felt the weight of a spatula. They have never learned to judge heat by the sound of sizzling oil. They have never developed the muscle memory that tells a human exactly how much force to use when stirring.
The implications are enormous. If Ropedia succeeds in building a comprehensive encyclopedia of human physical experience, it could become the foundation for a new generation of robots. Not just factory robots that repeat the same motion forever, but general-purpose robots that can adapt to new tasks, new environments, and new challenges.
This is why major tech companies and robot manufacturers are paying attention. The companies building robot hardware, like Tesla with Optimus, Figure, 1X, and Unitree, all need better training data. The companies building AI models, like those developing VLA systems and LeCun’s AMI Labs, need better physical world understanding. Ropedia sits at the intersection of both needs.
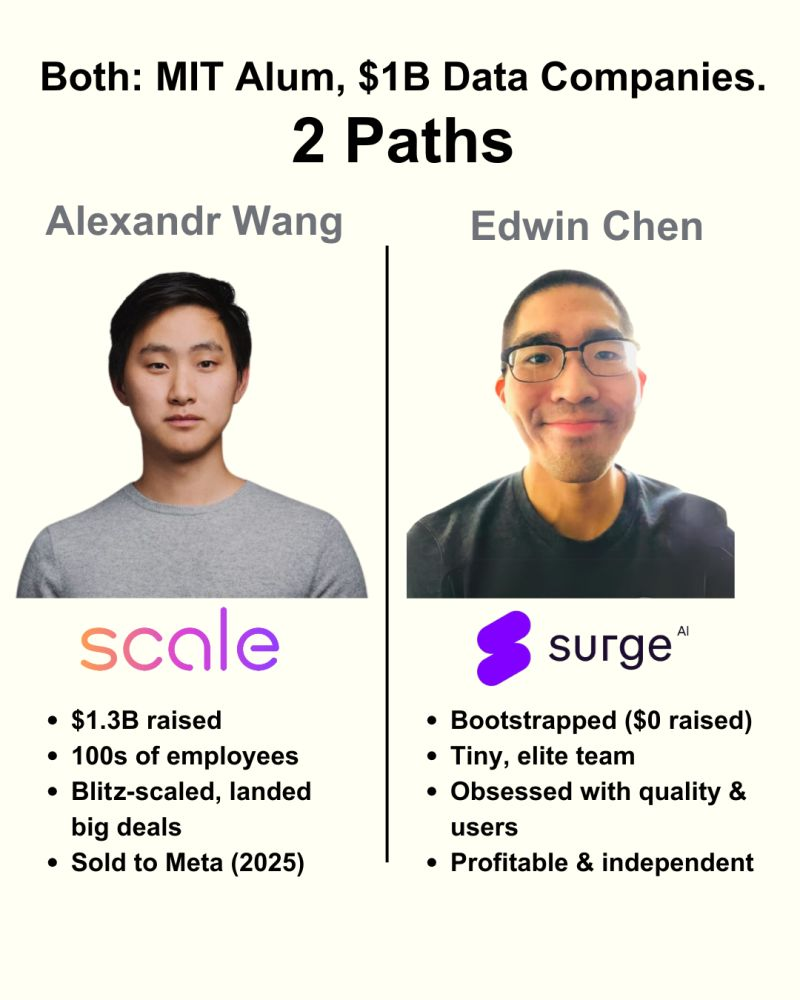
The company positions itself as a data science company, similar to how Scale AI became essential for training large language models. Scale AI built the infrastructure for labeling and curating text and image data. They became worth billions because every AI company needed their services. Ropedia aims to do the same thing for physical AI.
But the challenge is even bigger. Text and images are relatively simple compared to physical experience. A sentence has words and grammar. An image has pixels and colors. But physical experience has depth, force, texture, temperature, spatial relationships, temporal sequences, and causal consequences. The complexity is orders of magnitude higher.
This is why Ropedia’s structured approach matters so much. They are not just collecting more videos. They are building a new kind of data infrastructure specifically designed for the physical world. Their spatial foundation model converts raw human experience into structured knowledge that robots can actually use.
The timing could not be better. The entire robotics industry is converging on the same realization. Hardware is improving rapidly. AI models are getting more powerful. But the data bottleneck remains. Without better physical experience data, robots will keep hitting the same ceiling. They will be able to do impressive demos in controlled settings, but they will fail at the simple everyday tasks that humans take for granted.
LeCun’s billion-dollar bet on AMI Labs, the massive investments in robot hardware, and the growing recognition that video data alone is not enough, all point to the same conclusion. The next breakthrough in artificial intelligence will not come from bigger language models or better image generators. It will come from machines that can finally understand the physical world the way humans do.
Ropedia’s encyclopedia of human experience might be the missing piece. By turning everyday physical activities into structured, machine-readable knowledge, they are building the foundation for robots that can cook, clean, build, and interact with the world in ways that currently seem like science fiction.
The egg fried rice problem is just the beginning. Once robots have access to real human physical experience, the possibilities become endless. And the company that provides that experience data might become one of the most important players in the entire AI industry.
CADOAN is a professional, independent AI industry blog and information platform dedicated to the research, sharing, and popularization of artificial intelligence. We are a team of AI enthusiasts, researchers, and technical writers who focus on the development and application of modern artificial intelligence. We do not represent any commercial institution, technology company, or AI model camp. Our only position is to provide real, objective, and valuable AI content for readers, learners, developers, and business practitioners around the world.